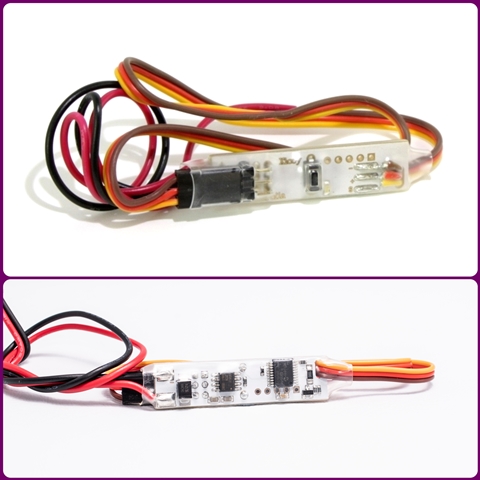
Electronic controller for electric brakes
Up to 12V/3A. 2 connection ports to connect 2 wheels.
Adjustable end points and 5 brake modes (Continuous or Pulsed, ABS like effect).
INSTRUCTIONS:
- Connect the servo lead to the brake output of the receiver.
- Connect the Red (+) and black leads to the battery. Reccomended battery voltage 7,2V (2s Lipo, 5 NiCd-NiMh). A123 2s and 3s allowed. 3S Lipo not reccomended on 6V brakes.
- Connect the brakes to the output connectors.
Adjustment:
- Power ON the TX and set the brake command to minimum. (Brake OFF position)-
- Power ON the receiver while keeping the button on the controller pressed. Once the blue led lits, release the button.
- The LED light will blink in a sequence of 1 blink. Check that your TX is set at the position of " Brake Off" and click on the button. The controller will store the received command as OFF command.
- The LED light will blink in a 2 blink sequence. Set the transmitter to the BRAKE MAXIMUM position. Click on the button to store the command.
Now the brake force will be proportional from zero to maximum.
ADJUSTING the "ABS":
The unit allow to modulate the brake force in 5 different steps to allow the wheel to rotate while appliying maximum brake force without creating flats on the tyre. Adjustment is simple: Just press the button to loop trough the 5 modes, from continuous brake to maximum pulse, checking the effect on the wheel until arriving to the desired pulse ratio.
Limiting the brake force:
If you want to limit the maximum brake force, you can do by reducing the ATV on the TX after doing the travel adjustment.
Diferential braking:
Each controller usually control the two main wheels, but If you need to control the brake force separately on each wheel, like is done in the full size warbirds to steer, then you need two controllers, one in each wheel, and to do the appropiate mix on the transmitter.



